Segmentation Fault (Core dumped)问题解决记录
我遇到的Segmentation Fault (Core dumped)问题不同于课程BBS上有朋友提出的那种,我不是写了代码后因为代码问题导致出错的,而是直接编译运行作业8的框架就报了这个错误,说明并非代码问题。我始终没有找到与我遇到相同问题的朋友,因此解决这个问题花了我不少时间,因此这篇文章特意保留了我搜索解决这个问题的简单记录,希望能帮助到遇到同样问题的朋友们。
------------------------------------------------------4.6 分界线---------------------------------------------------------
作业8一直出现segmentation fault的问题,即便是直接使用作业框架运行也是如此,问题可能不是出在作业的代码上。
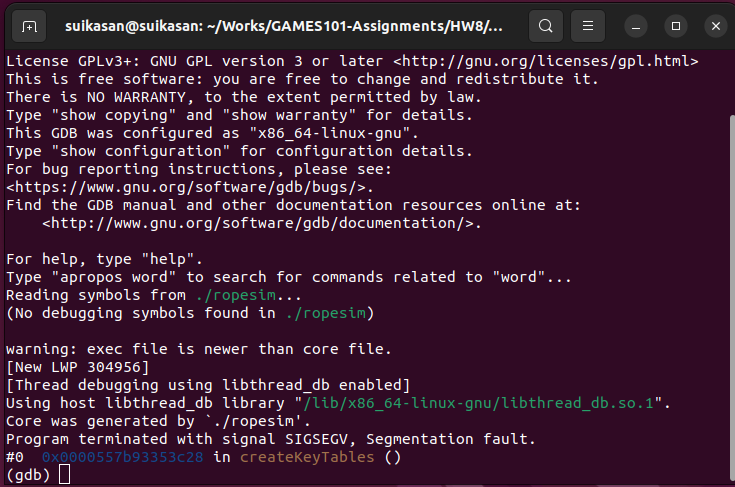
我使用gdb查看过生成的core文件,如下
于是在工作区搜索createKeyTable()函数
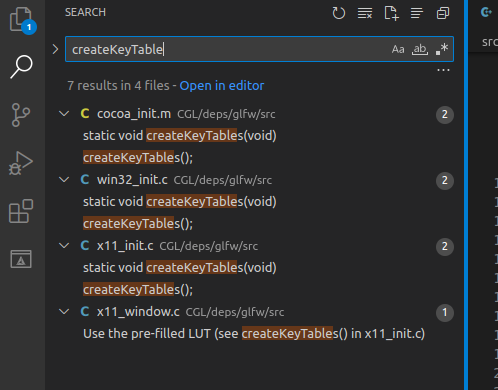
问题似乎出在了glfw库中?真见鬼了…
感觉也不像是glfw的问题。我下载了其他朋友完成的作业8在我电脑上运行,仍然是segmentation fault.
研究这问题一整天了,暂时实在没法解决,目前我的猜测是我这台电脑ubuntu有点问题,后续有空继续尝试解决,或者等七月回家之后换台设备再次尝试。
作业8只能暂时搁置了,等后续问题解决之后再补上这篇文章以及github仓库。
------------------------------------------------------4.7 分界线---------------------------------------------------------
想不到第二天居然解决了
我找到了这篇文章——Resolving Segmentation Fault (“Core dumped”) in Ubuntu.文章中给出了解决Ubuntu系统下Segmentation Fault (Core dumped)问题的方法,我先使用了第一种命令行方法,结果没想到把系统搞崩了,Ubuntu桌面没了,重新装了一下桌面进去试了一下代码,没能成功解决。然后我尝试了一下第二种方法,开机进入Advanced options for Ubuntu,选择Run Ubuntu in the recovery mode,然后Repair broken packages,修复完毕后进入系统运行代码发现居然成功了。
如果你也遇到了直接编译运行作业8代码框架也会出现Segmentation Fault (Core dumped)的问题,或许也是因为Ubuntu系统的问题,不妨试一下这个方法。
注:完成作业过程中,我某次开机重启后,发现再次出现Segmentation Fault (Core dumped)问题,不过重新使用一次上述的第二种方法后又成功解决了。
作业描述
本次作业将实现弹簧质点系统
主要工作如下:
- Rope::Rope in rope.cpp: 完成Rope类的构造函数,实现连接绳子的约束;
- Rope::simulateEuler in rope.cpp: 利用欧拉方法实现胡克定律;
- Rope::simulateVerlet in rope.cpp: 实现显式Verlet方法;
- Rope::simulateVerlet in rope.cpp: 向显式Verlet方法积分的胡克定律中加入阻尼。
完成作业
Rope::Rope
// in rope.cpp
Rope::Rope(Vector2D start, Vector2D end, int num_nodes, float node_mass, float k, vector<int> pinned_nodes)
{
// TODO (Part 1): Create a rope starting at `start`, ending at `end`, and containing `num_nodes` nodes.
// Comment-in this part when you implement the constructor
// for (auto &i : pinned_nodes) {
// masses[i]->pinned = true;
// }
Vector2D step = (end - start) / (num_nodes - 1);
for(int i = 0; i < num_nodes; ++i){
masses.push_back(new Mass(start + step * i, node_mass, false));
if(i > 0){
springs.push_back(new Spring(masses[i-1], masses[i], k));
}
}
for(auto &i : pinned_nodes){
masses[i]->pinned = true;
}
}根据传入的起始与终止位置以及质点数量构造质点,step为质点间的间距,在相邻两质点间构造弹簧,弹簧系数为k.最后的for循环根据传入的pinned_nodes将对应质点设为固定的。
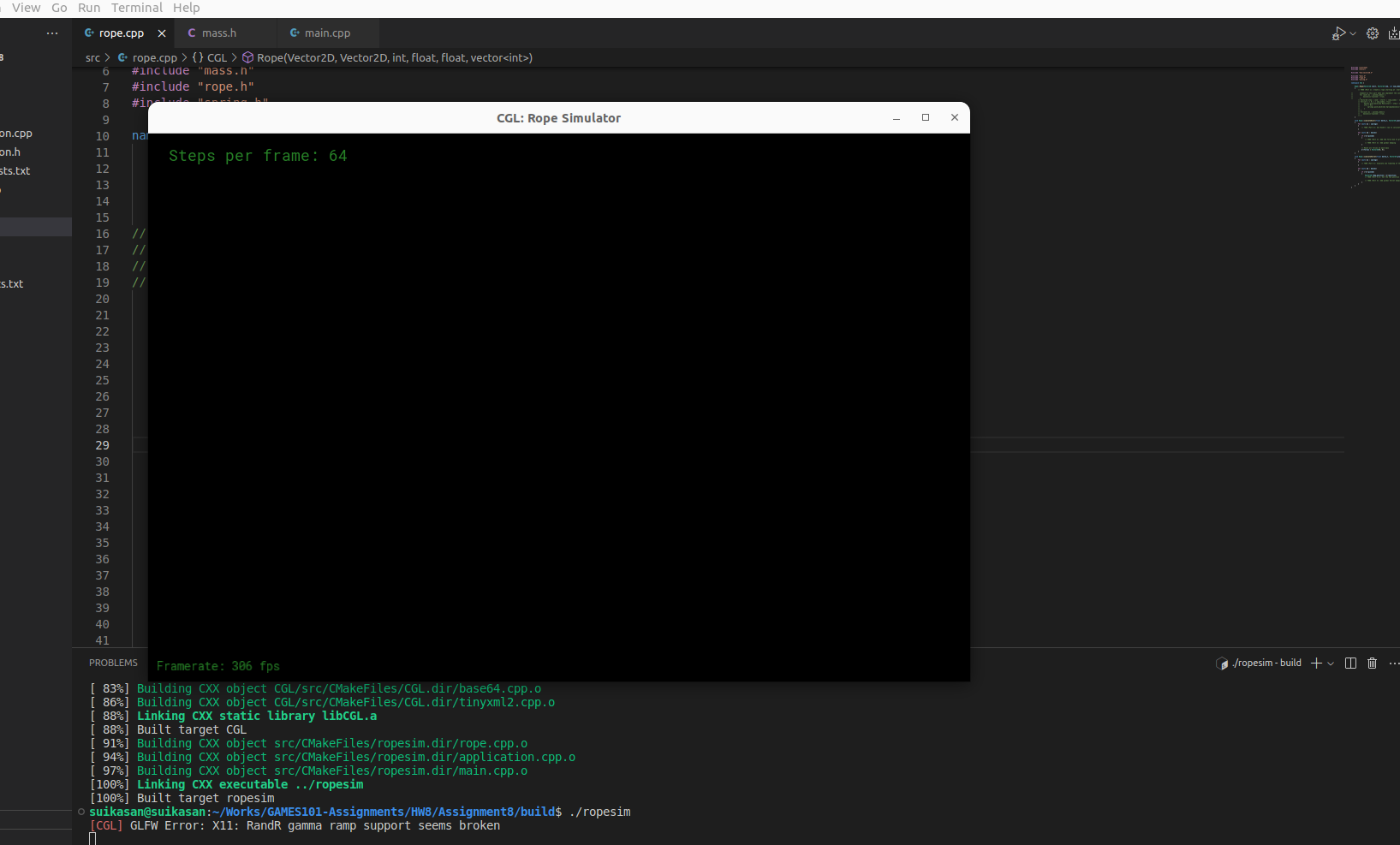
编译运行
Rope::simulateEuler
// in rope.cpp
void Rope::simulateEuler(float delta_t, Vector2D gravity)
{
for (auto &s : springs)
{
// TODO (Part 2): Use Hooke's law to calculate the force on a node
Vector2D dis = s->m1->position - s->m2->position;// 两质量距离矢量,m2指向m1
float curr_length = dis.norm();// 弹簧当前长度
Vector2D force = s->k * (curr_length - s->rest_length) * dis / curr_length;// 对于m2的力矢量
s->m1->forces -= force;
s->m2->forces += force;
}
for (auto &m : masses)
{
if (!m->pinned)
{
// TODO (Part 2): Add the force due to gravity, then compute the new velocity and position
m->forces += gravity * m->mass;// 加上重力
Vector2D a = m->forces / m->mass;// 加速度a=F/m
m->velocity += a * delta_t;
m->position += m->velocity * delta_t;
// TODO (Part 2): Add global damping
}
// Reset all forces on each mass
m->forces = Vector2D(0, 0);
}
}首先利用胡克定律计算结点的受力(变量计算说明见注释),记得不要搞错方向。
在第二个for循环中遍历质点,加上重力,并计算加速度,以此更新速度与位置。
// in application.cpp
ropeEuler = new Rope(Vector2D(0, 200), Vector2D(-400, 200), 16, config.mass,
config.ks, {0});
ropeVerlet = new Rope(Vector2D(0, 200), Vector2D(-400, 200), 16, config.mass,
config.ks, {0});3个结点太少,application.cpp中修改上述函数,将结点数量改为16个。
编译运行
此时由于没有引入Damping,弹簧将永远不会停止运动,并且运动状态特别不稳定。
下面加入Damping,修改后的Rope::simulateEuler如下
// in rope.cpp
void Rope::simulateEuler(float delta_t, Vector2D gravity)
{
for (auto &s : springs)
{
......
// Internal Damping
Vector2D D_V = s->m1->velocity - s->m2->velocity;
Vector2D disNorm = dis / curr_length;
float k_d = 0.05f;
Vector2D force_a = -k_d * (disNorm.x * D_V.x + disNorm.y * D_V.y) * dis / curr_length;
s->m1->forces += force_a;
s->m2->forces -= force_a;
}
for (auto &m : masses)
{
......
}
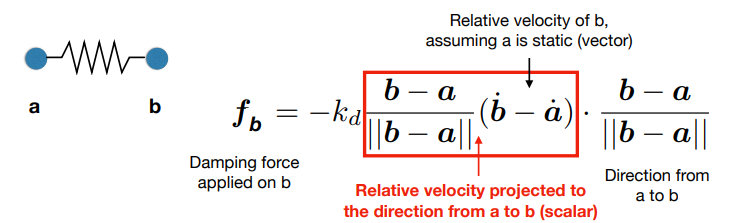
}加入了Internal Damping,具体计算方法如Lecture 21中所述,其实就是套如下公式,唯一的区别是ppt中公式计算的力是对b点而言的,上面代码中则是先计算a点,即m1
编译运行结果如下
可见弹簧的运动状态变得更加稳定,但是由于没有空气阻力,弹簧仍然不会静止
下面引入空气阻力
// in rope.cpp
void Rope::simulateEuler(float delta_t, Vector2D gravity)
{
for (auto &s : springs)
{
......
// Internal Damping
Vector2D D_V = s->m1->velocity - s->m2->velocity;
Vector2D disNorm = dis / curr_length;
float k_d = 0.05f;
Vector2D force_a = -k_d * (disNorm.x * D_V.x + disNorm.y * D_V.y) * dis / curr_length;
s->m1->forces += force_a;
s->m2->forces -= force_a;
// Air Damping
s->m1->forces += -0.005f * s->m1->velocity;
s->m2->forces += -0.005f * s->m2->velocity;
}
for (auto &m : masses)
{
......
}
}编译运行
弹簧运动稳定且最终会静止
最终,完整的Rope::simulateEuler函数如下
// in rope.cpp
void Rope::simulateEuler(float delta_t, Vector2D gravity)
{
for (auto &s : springs)
{
// TODO (Part 2): Use Hooke's law to calculate the force on a node
Vector2D dis = s->m1->position - s->m2->position;// 两质量距离矢量,m2指向m1
float curr_length = dis.norm();// 弹簧当前长度
Vector2D force = s->k * (curr_length - s->rest_length) * dis / curr_length;// 对于m2的力矢量
s->m1->forces -= force;
s->m2->forces += force;
// Internal Damping
Vector2D D_V = s->m1->velocity - s->m2->velocity;
Vector2D disNorm = dis / curr_length;
float k_d = 0.05f;
Vector2D force_a = -k_d * (disNorm.x * D_V.x + disNorm.y * D_V.y) * dis / curr_length;
s->m1->forces += force_a;
s->m2->forces -= force_a;
// Air Damping
s->m1->forces += -0.005f * s->m1->velocity;
s->m2->forces += -0.005f * s->m2->velocity;
}
for (auto &m : masses)
{
if (!m->pinned)
{
// TODO (Part 2): Add the force due to gravity, then compute the new velocity and position
// TODO (Part 2): Add global damping
m->forces += gravity * m->mass;// 加上重力
Vector2D a = m->forces / m->mass;// 加速度a=F/m
m->velocity += a * delta_t;
m->position += m->velocity * delta_t;
}
// Reset all forces on each mass
m->forces = Vector2D(0, 0);
}
}
Rope::simulateVerlet
// in rope.cpp
void Rope::simulateVerlet(float delta_t, Vector2D gravity)
{
for (auto &s : springs)
{
// TODO (Part 3): Simulate one timestep of the rope using explicit Verlet (solving constraints)
Vector2D dis = s->m1->position - s->m2->position;// 两质量距离矢量,m2指向m1
float curr_length = dis.norm();// 弹簧当前长度
Vector2D force = s->k * (curr_length - s->rest_length) * dis / curr_length;// 对于m2的力矢量
s->m1->forces -= force;
s->m2->forces += force;
}
for (auto &m : masses)
{
if (!m->pinned)
{
Vector2D temp_position = m->position;
// TODO (Part 3.1): Set the new position of the rope mass
m->forces += gravity * m->mass;
Vector2D a = m->forces / m->mass;
// TODO (Part 4): Add global Verlet damping
float damping_factor = 0.00005;
m->position = m->position + (1 - damping_factor) * (m->position - m->last_position)
+ a * delta_t * delta_t;
m->last_position = temp_position;
}
m->forces = Vector2D(0,0);
}
}前面与欧拉法一致,根据如下公式
x(t+1) = x(t) + (1 - damping_factor) * [x(t)-x(t-1)] + a(t) * dt * dt进行模拟,并引入阻尼
结果如下