Light Field / Lumigraph-光场
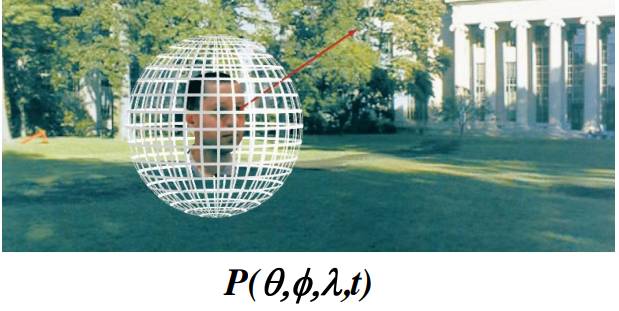
Plenoptic Function(全光函数)描述了在当前场景下人可以看到的所有信息。
对于灰度图像,全光函数可以表示成如下极坐标形式
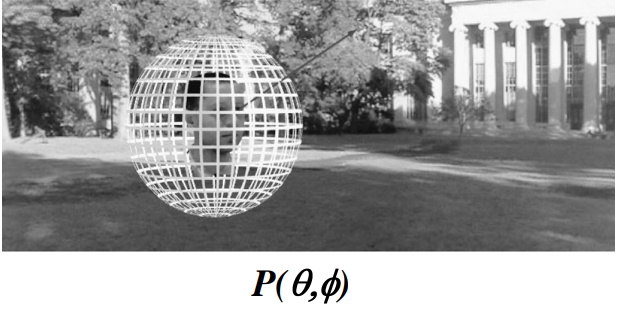
如果在其中加入第三维表示光的波长,可以表示出彩色的场景
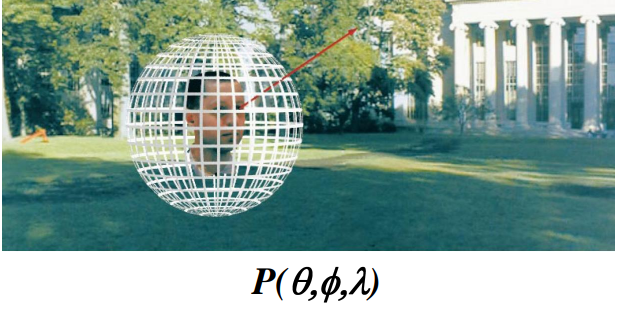
如果进一步加入时间t这一维度,那么就变成了电影
以上都是对于固定的位置的函数,如果函数中观察位置也可以改变,那么就变成了全息电影
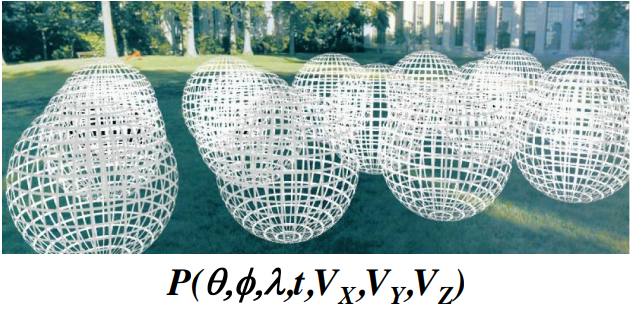
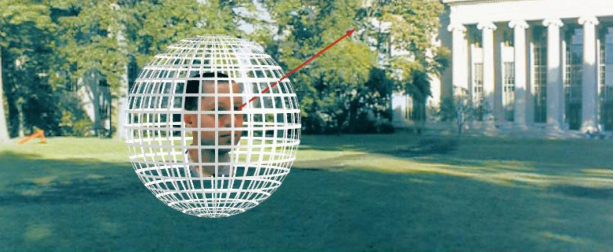
换个角度理解,如果将上式认为是表示在场景中任何位置朝任何方向,在任何时间看到的场景,那便是真正的全光函数了。
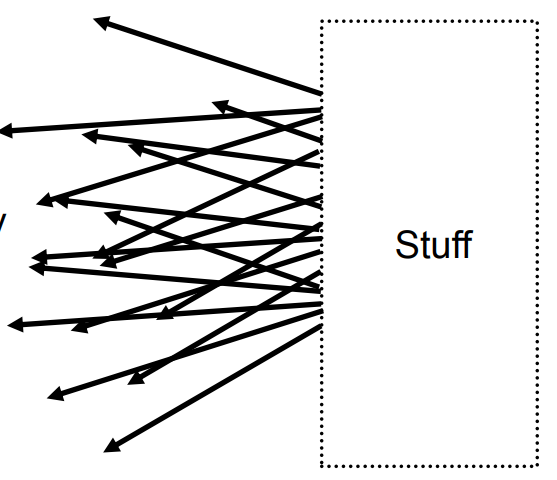
光场就是在场景中任何一个位置朝任何一个方向发出的光的强度。光场是全光函数的一部分,仅用两个维度表示位置,两个维度表示方向,暂且忽略颜色和时间。这里用二维表示位置是因为三维物体的表面可以映射到二维,类似uv坐标。
事实上,我们可以将发光物体当成是黑盒,不需要知道它具体是什么物体,只需要知道盒子上任一点朝任一方向的发光情况即可。
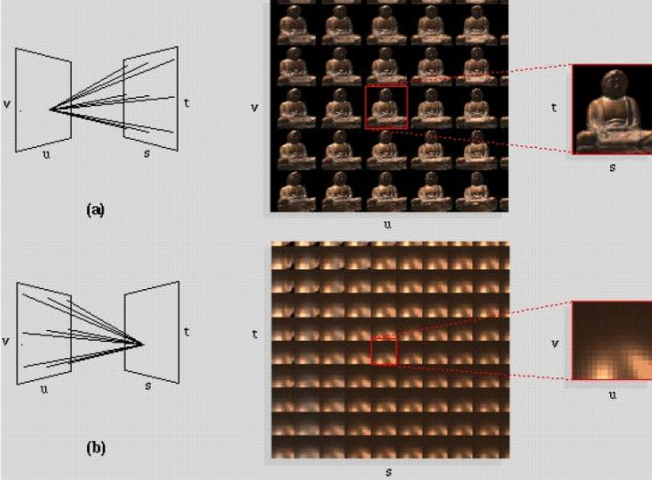
可以对光场进行参数化,用两个相互平行的平面上各一个点((u,v),(s,t))来表示一条光线
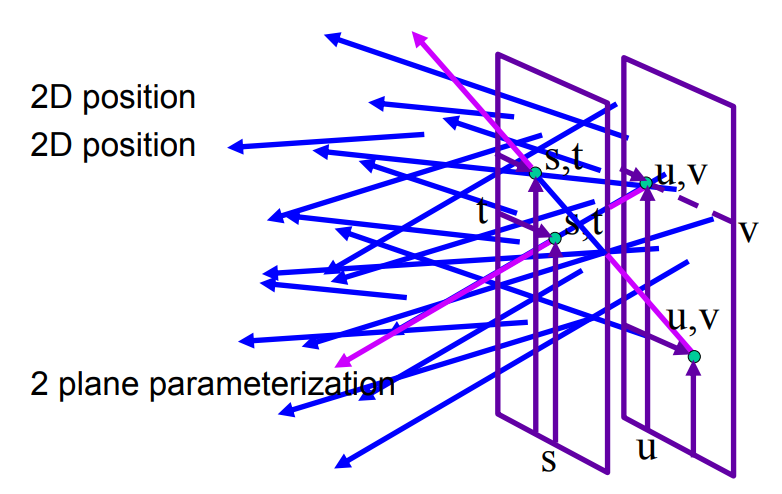
如果取uv平面上的固定点,看向整个st平面,会看到一个完整的物体,uv上取不同点对应的是不同角度;而如果取st平面上的固定点,看向整个uv平面,会看到物体一个特定部分不同角度的样子。
此处uv,st平面的定义似乎与上面图中是相反的,整个世界位于st平面的右侧
Light Field Camera-光场相机
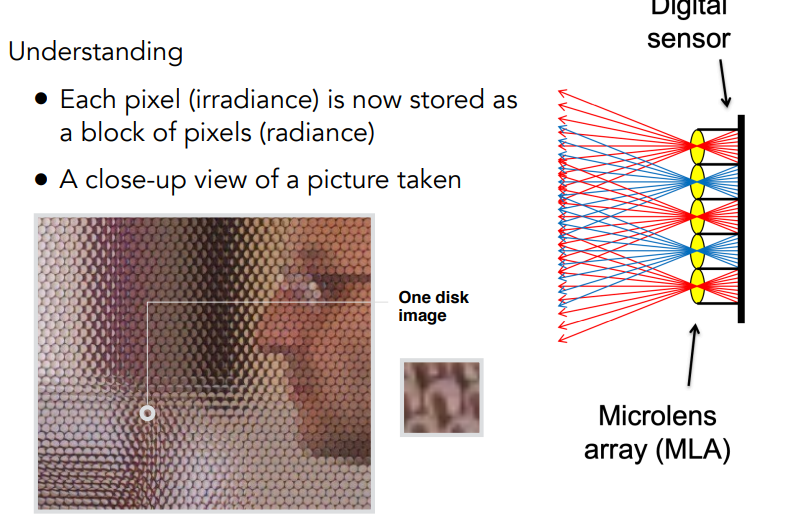
光场相机可以将一个像素上来自不同方向的光通过微透镜分开,然后分别记录。
光场相机拍摄的照片可以后期重新修改聚焦。
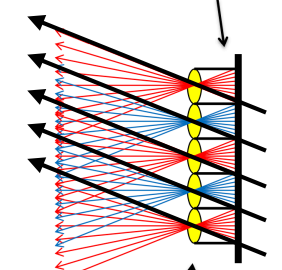
光场相机相当于是将传统相机的成像平面位置换成了微透镜,而将真正的成像平面后移,这样一来来自不同方向的光会被微透镜分散到成像平面的不同位置,从而分开记录。传统相机记录的是一个像素,光场相机记录的则是一块像素,每一块都是一个圆形,将该圆形中的信息平均成一个像素,就变成了传统相机里的像素。
对于每一个微透镜,选取其分开的光线中的其中一条,将其对应的结果作为当前微透镜对应的像素,由此就能得到一张普通的照片。如果取不同方向的光线,就相当于移动了相机的位置与方向。重新聚焦也是使用同样的方法实现的。
光场相机也有其缺点,比如分辨率不足的问题。
Color
Physical Basis of Color-颜色的物理基础
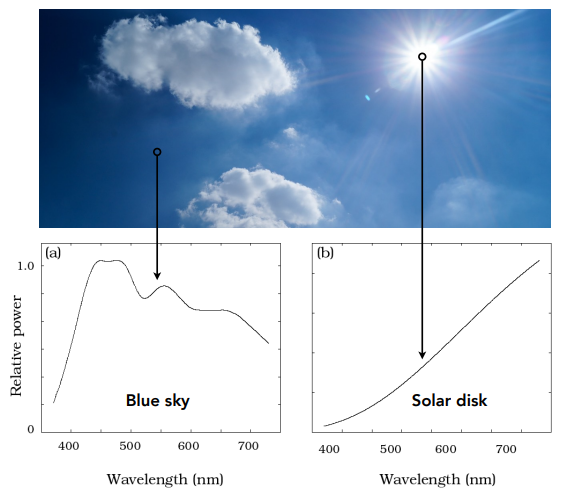
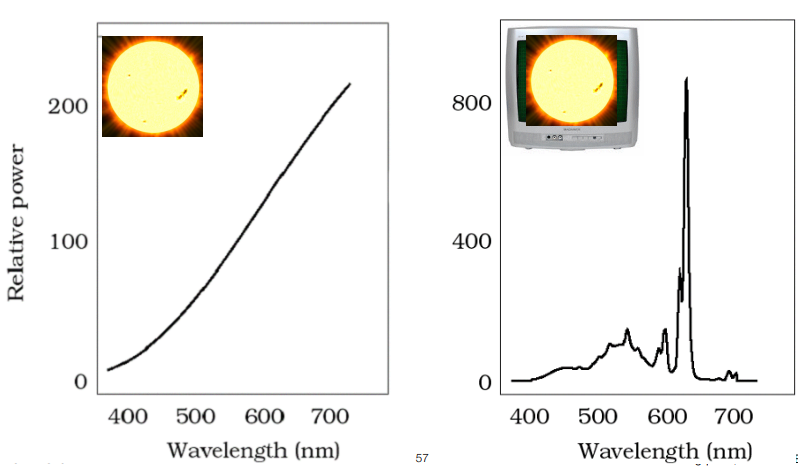
光的能量在不同波长分布形成了光谱(Spectrum),可见光波长大约分布在400-700nm
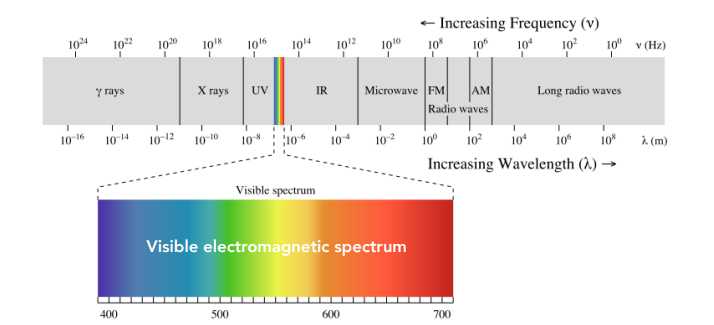
谱功率密度(Spectral Power Distribution, SPD)也可以描述能量在波长/频率上的分布
SPD具有线性性质
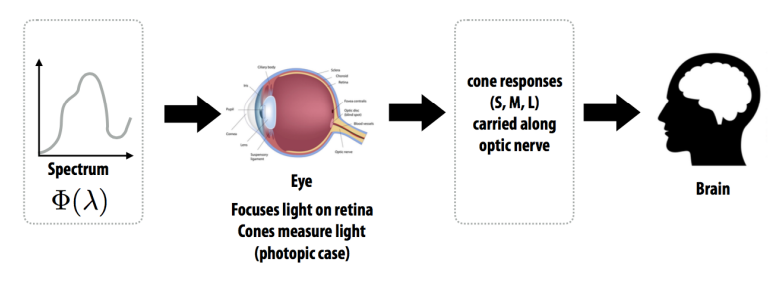
Biological Basis of Color-颜色的生物基础
人的眼睛结构如下,其中瞳孔就相当于光圈,晶状体相当于透镜,视网膜相当于传感器。
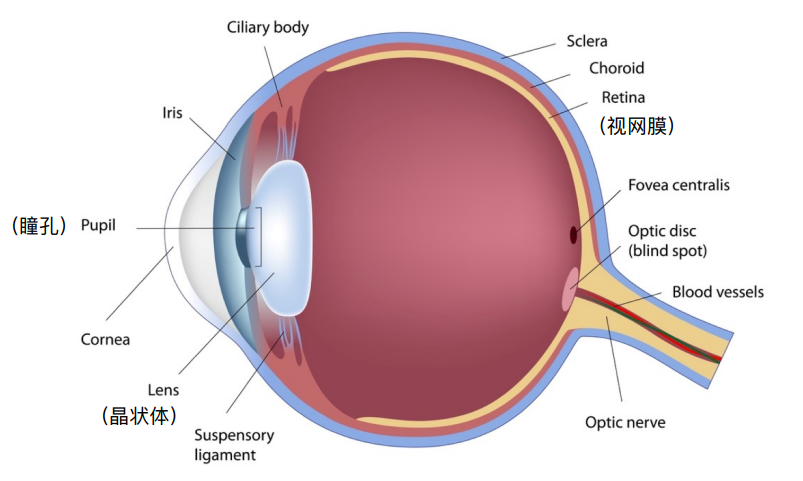
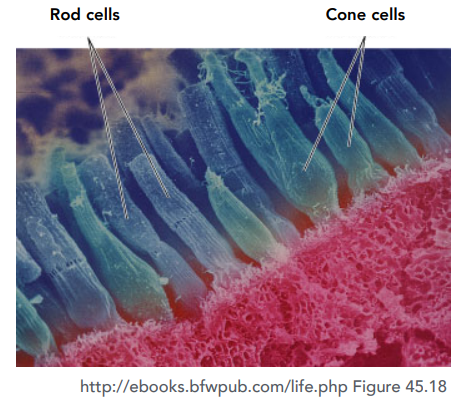
视网膜上有许多感光细胞(Photoreceptor Cell),感光细胞可分为两类,视杆细胞(Rod)和视锥细胞(Cone)。其中视杆细胞感知光的强度,而视锥细胞感知颜色。视锥细胞相比视杆细胞要少很多,这也是为什么人类对明暗要比对颜色更敏感。
视锥细胞又可分为S、M、L三类,其对不同波长的可见光的响应和敏感程度各不相同
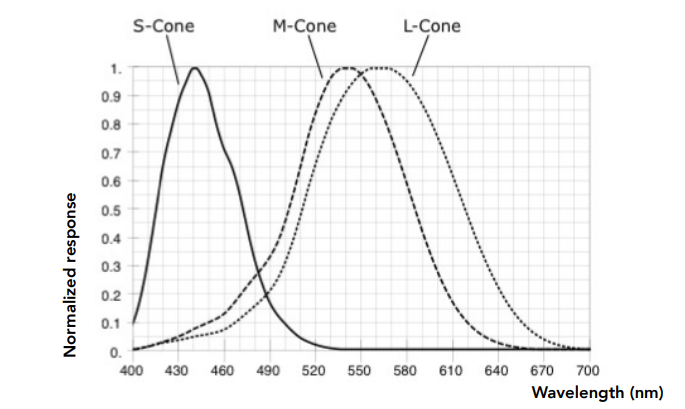
三种细胞占比的个体差异非常大。
Tristimulus Theory of Color-颜色的三刺激理论
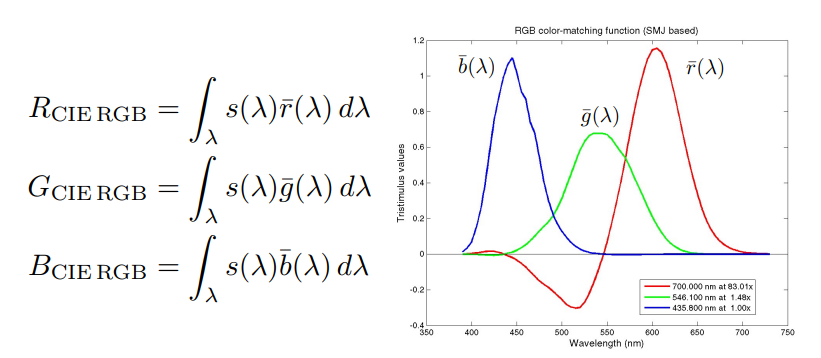
当知道了光的波长的分布,根据上述三类视锥细胞对光的响应,利用下面的积分即可计算人眼对光感知的结果
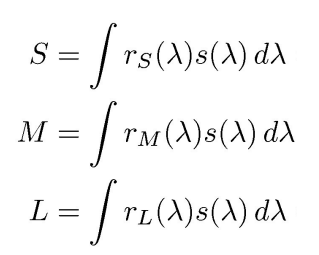
由上,人类看到的实际上不是光谱,而是“看到”计算出的SML三个数。
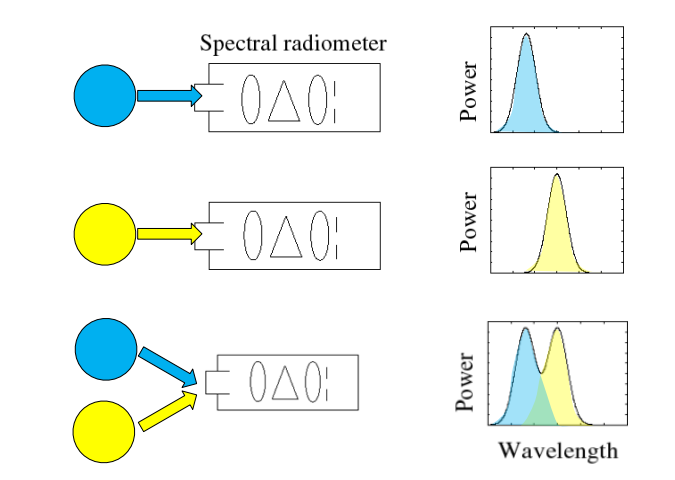
Metamerism-同色异谱
不同的信号经过上述SML积分计算得到的三个数相同,这就是同色异谱现象。
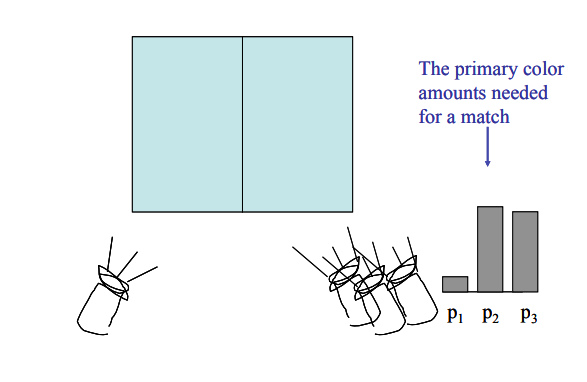
Color Reproduction / Matching-颜色再现与匹配
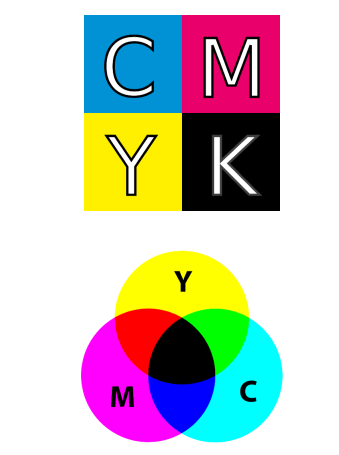
计算机中的色彩系统为加色系统,以RGB三色作为原色。

注:计算机中将各种颜色进行调和,当RGB值越来越接近255,颜色就会越来越接近与白色,这就是加色系统;而实际绘画中,不同颜色调和会越调越黑,这就是减色系统。
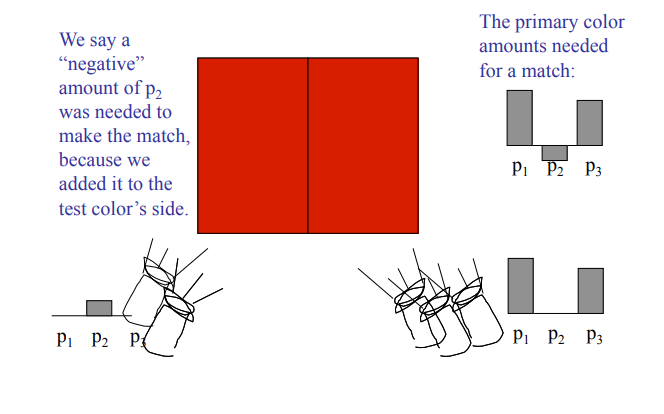
我们可以通过RGB三色调和得到我们需要表示的颜色,其中三种颜色的系数可能会出现负数,这种情况相当于在需要表示的颜色中加上一个颜色。
CIE RGB
CIE RGB的三原色
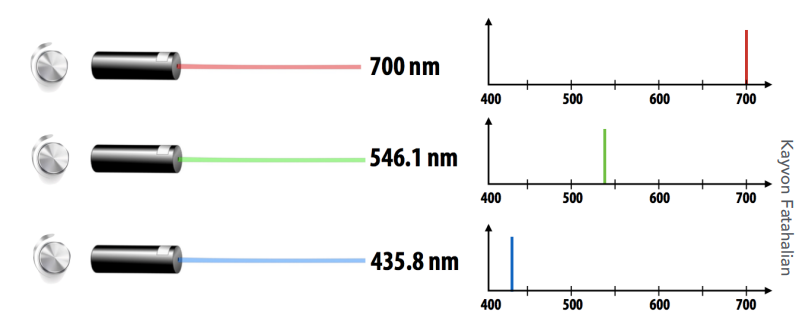
对于任意波长的可见光,有如下匹配关系
Color Space-色彩空间
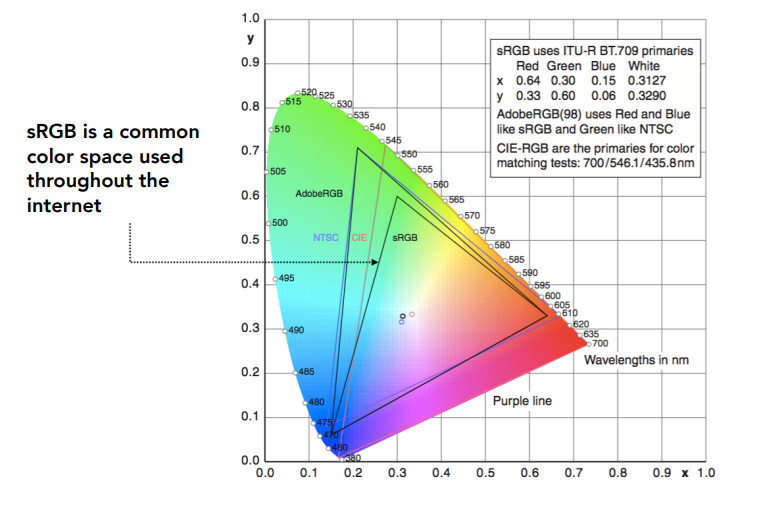
Standardized RGB(sRGB)
Standardized RGB(sRGB)是广泛使用的色彩空间,使用一台特定显示器的RGB空间作为标准RGB空间,其他色彩设备通过校准来模拟那台标准设备。sRGB空间的色域(gamut)是有限的。
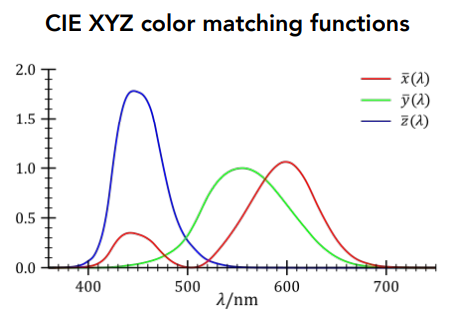
CIE XYZ
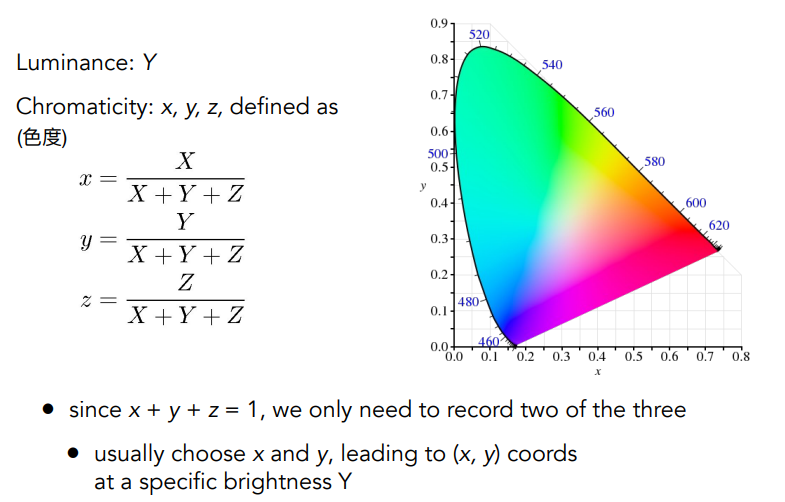
CIE XYZ色彩空间中,利用X,Y,Z三个值表示颜色,特别地,Y在其中表示亮度
CIE XYZ色彩空间的颜色匹配关系如下
Y表示亮度(Luminance),将X,Y,Z归一化后得到x,y,z,用于表示色度(Chromaticity)。固定Y,则只需记录其中两个值便可以得到颜色,于是可以得到如右图的色域。
不同色彩空间所能表示的色域各不相同,如下
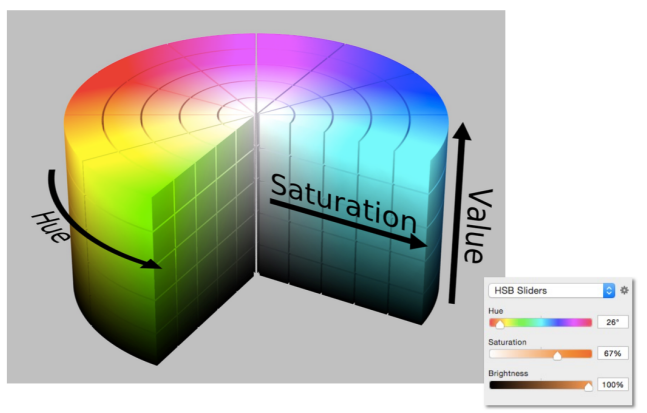
HSV Color Space
HSV也是一种常见的色彩空间,他由HSV(色相Hue,饱和度Saturation,色明度Value)三个值定义。
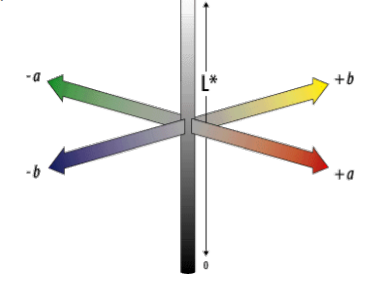
CIELAB Space(L*a*b)
CIELAB Space(又称L*a*b),是利用互补色定义的色彩空间,其中L表示亮度,a*表示红绿轴上的值,b*表示蓝黄轴上的值,其中红和绿、蓝和黄就是两对互补色
颜色总是相对的。
CMYK减色系统
类似CMYK的减色系统在印刷上较为常见。