
Camera
Image = Synthesis + Capture
相机可以使用针孔或透镜在传感器上成像。传统意义上,传感器记录的是Irradiance而不是Radiance
Pinhole Image Formation-针孔成像
有关针孔成像的研究最早可追溯到公元前四五世纪,如墨子、亚里士多德都曾研究过这个现象。
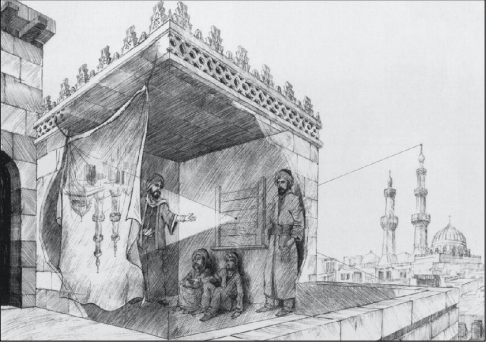
如今利用针孔进行成像得到照片也是完全没有问题的

Field of View(FOV)-视场
视场决定了我们能在照片中看到的范围
焦距对视场的影响
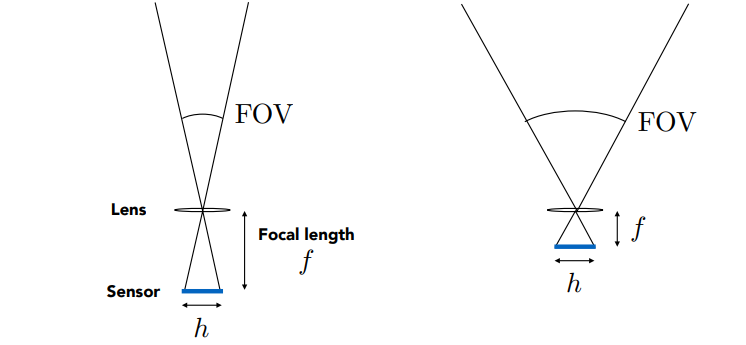
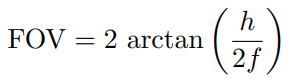
定义视场时,通常以35mm(36$\times$24mm)大小的传感器为基准,以焦距来描述。比如在基准传感器上,焦距17mm为广角(104°),焦距50mm为普通镜头(47°),焦距200mm为长焦(12°)。如今我们手机的焦距是经过等效的,手机没有这么厚,也没有这么大的传感器。
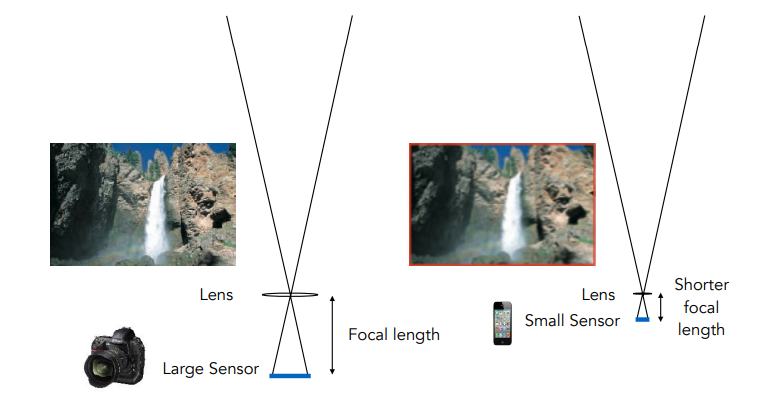
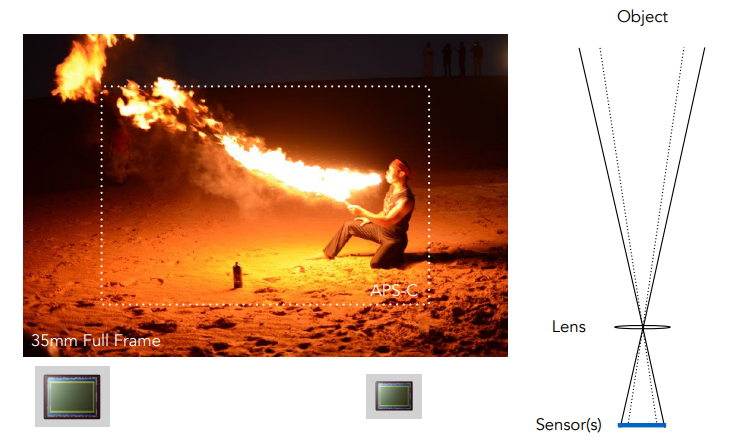
传感器大小对视场的影响
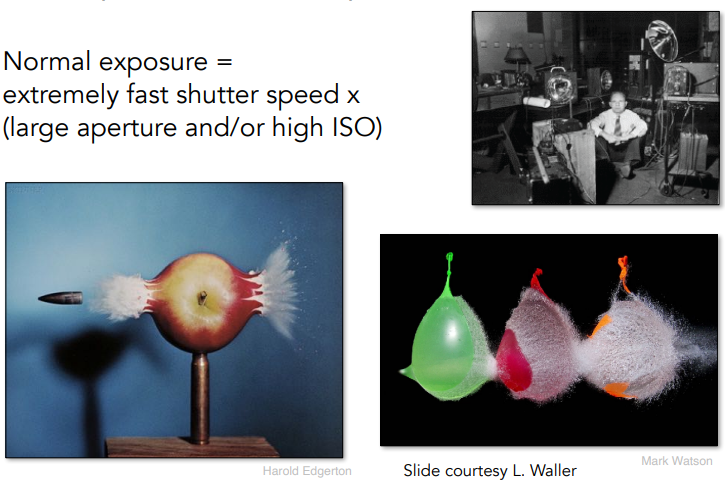
Exposure-曝光
其中曝光时间由快门控制,而Irradiance受光圈和焦距影响。
曝光三要素:光圈、快门、ISO
光圈用F数(F-Number, F-Stop)表示,F数越小光圈越大。其具体定义为焦距/光圈直径。
在快门打开的时间内,如果物体已经产生运动,则会产生运动模糊。
机械快门无法做到所有位置在同一时间同时打开。高速运动的物体会因此产生Rolling Shutter问题,如飞机高速转动螺旋桨会产生扭曲。
下图中每一列的光圈与快门组合获得的曝光度基本上是等效的。注意,这并不意味着获得的照片是一样的,因为两者会分别各自影响景深和运动模糊。

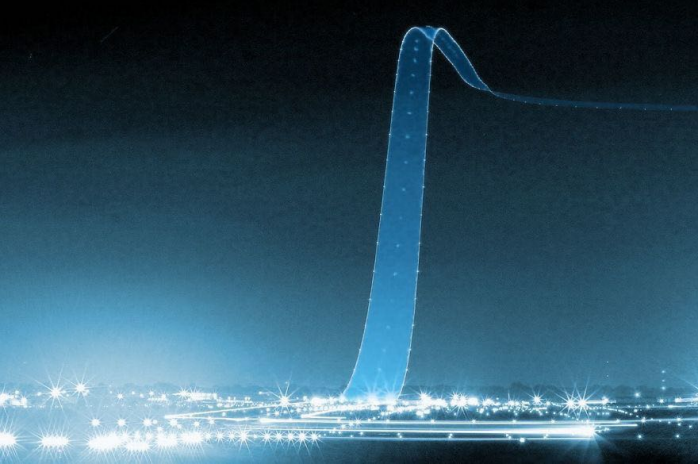
Fast and Slow Photography
高速摄影
长曝光
Thin Lens Approximation-薄透镜近似
通常手机、相机的镜头不会使用单个透镜,一般都会使用十分复杂的透镜组。
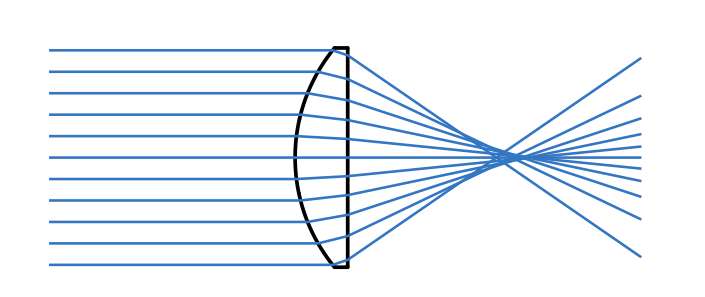
平凸透镜无法将光汇聚到一个点上
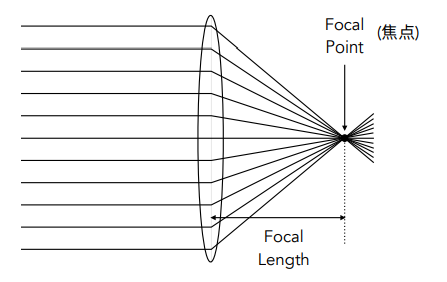
在图形学中,对理想薄透镜有如下假设:
- 所有进入薄透镜的平行光都会经过焦点;
- 所有经过焦点而进入薄透镜的光在穿过透镜后都会变成平行光;
- 薄透镜的焦距可被任意改变。
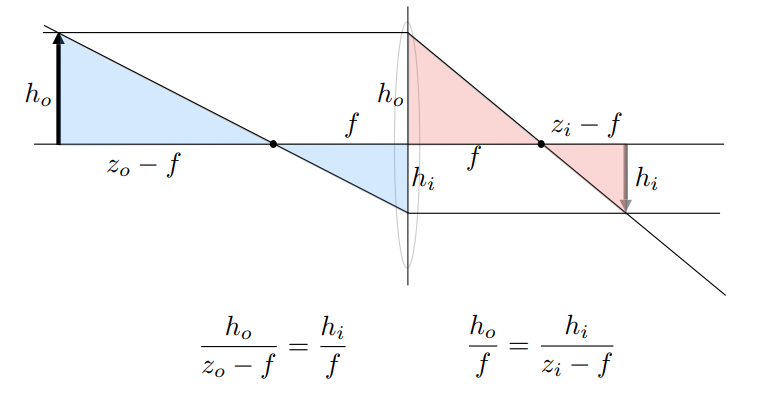
对于理想薄透镜有如下等式:
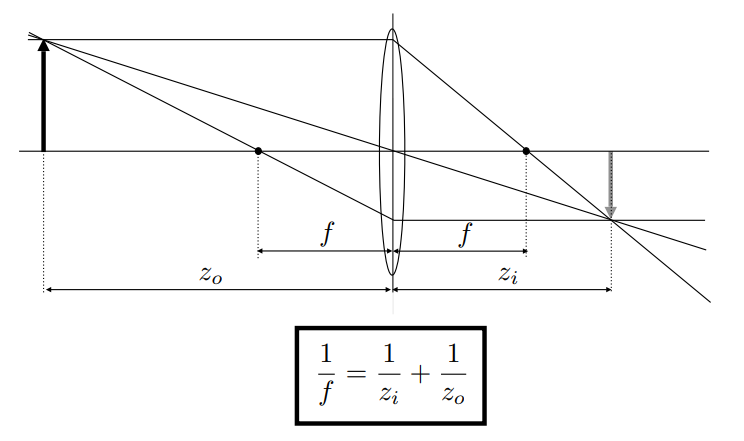
为物距,为像距,为焦距
可由如下方法计算
Defocus Blur
当成像平面不在焦距位置时,光线继续传播,原本一个点的像被成像在了一个面上,这个面是个圆形平面,被称为Circle of Confusion(CoC)
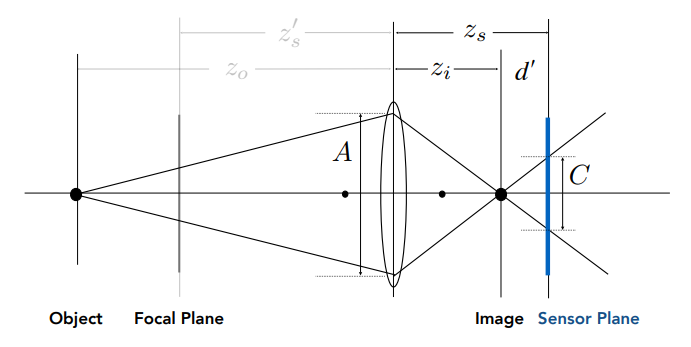
CoC计算公式如下
CoC大小取决于光圈大小
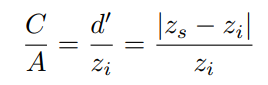
Ray Tracing Ideal Thin Lenses
光线追踪方法也可以实现真实情况下透镜的景深效果
在这种方法中,需要先设定传感器大小、焦距、光圈大小,然后设定物距,根据透镜公式计算像距
具体渲染:
对于传感器上的每个像素,在透镜平面随机采样一个点,根据光线以及薄透镜等式可以求得光线,其中为物体所在平面的点,光线上带有的Radiance会最终记录在点
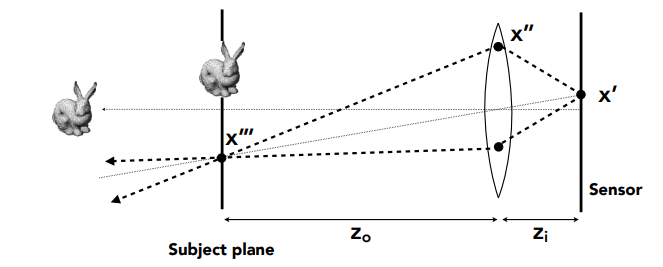
Depth of Field
光圈大小会影响景深模糊的范围
实际场景中有一段深度内的物体在经过透镜后,会在成像平面附近形成一段区域,它们的CoC也被认为是足够小而能够清晰成像的。
.PNG)